An App to Design Flux Focusing Adhesion Systems for Climbing Robots
Mobile robotics is an active research area, which is rapidly advancing thanks to a variety of technological developments in hardware and sensors. The operating environment and the tasks it must carry out are the main factors influencing the design of a climbing robot for industrial applications. Systems tend to employ either energy intensive suction cups or dynamic vortex adhesion methods for climbing on non-ferrous surfaces but when it comes to ferrous surfaces, the preferred choice is electromagnetic adhesion or permanent magnets. Nevertheless, while electromagnets offer the ability to control the magnetic field on demand, they require constant energy consumption to maintain their magnetic field. Research activities on wall climbing robots have been carried out for several years now, with focus on the payload capacity, mobility adhesion safety and energy consumption.
We are interested in designing an adhesion system to enable a robot to climb the hull of a ship in order to inspect the long weld lines. Moreover, if the adhesion force could be further increased, it may be possible for the robot to climb on reinforced concrete structures to inspect for defects on internal steel rebars.
These scenarios remain a challenge, as it is necessary to balance adhesion force with the payload of the robot. The more the payload/weight of the robot, the more adhesion force needed. In order to be able to move the robot with such forces, the drive motors require significant torque, which require larger motors and even more payload. To tackle the analysis of this problem we used COMSOL Multiphysics®.
LSBIC have designed an App using the Application Builder. The model uses the Magnetic Fields, no Currents interface from the AC/DC module. While we did not use any models of the application libraries, the permanent magnet model was an inspiration.
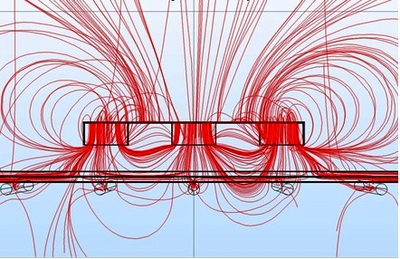
The objective of this App is to simplify the study of flux focusing adhesion forces. From this App, it is possible to choose different (global) parameters such as the size and relative permeability of the magnet as well as the structure it will be attracted to (e.g. ferrous plate, single rebar or a mesh of rebars) to easily build and modify the model. The App includes a preview geometry button and from the user interface, it is possible to visualize and switch between different results such as (e.g. Magnetic Flux density norm) Multislice, contour or streamlines. Additionally, the help menu explains how to use the App. Further work yet to be undertaken, includes adding features that will calculate the minimum torque required for a motor to be able to cope with such magnetic forces and thus the total payload of the robot. This will complete our app to design flux focussing adhesion systems for climbing robots over ferrous surfaces. The results given by the App not only have been validated with a test rig for a single magnet (confirming manufacturer specifications) but also for an arrangement of magnets over a rebar that has enable us to build a climbing robot for reinforce concrete inspection.