

Today, we invite guest blogger Bauke Kooger of Delft University of Technology to discuss modeling a magnetic suspension system for the Hyperloop.
The Hyperloop is a proposed mode of transportation in which a vehicle, or pod, travels at the speed of sound through a low-pressure tube. At this speed, a magnetic suspension offers several advantages over systems such as air bearings or wheels. To test this, Delft’s Hyperloop team modeled their pod’s magnetic suspension in the COMSOL Multiphysics® software.
Wait, What Is the Hyperloop?
The original idea for the Hyperloop came from Elon Musk, the man behind SpaceX, who promoted it as a faster, cleaner, and cheaper alternative to a proposed high-speed rail track between San Francisco and LA. His idea was to place a small pod in a tube with a mild vacuum and have the pod float on air bearings instead of wheels. The reduced pressure in the tube eliminates most of the air drag. The remaining air would then be compressed for an even bigger reduction in drag and to enable the use of air bearings.
While Musk himself does not intend to build a Hyperloop, SpaceX decided to host a competition to accelerate its realization. They built a 1.5 km half-scale test track and invited teams from around the world to design a pod for the tube.

Rendering of Delft’s Hyperloop competition vehicle.

Delft’s Hyperloop competition vehicle at the reveal event in July 2016.
The Delft Hyperloop team, who is competing in the SpaceX Hyperloop competition final in January 2017, consists of approximately 30 students from the Delft University of Technology in the Netherlands. By carefully reviewing the concept of the complete system, the team, which includes me, found that using a magnetic suspension would be much more beneficial than the originally proposed air bearings, reducing the complexity and cost.
Designing a Magnetic Suspension System with COMSOL Multiphysics®
While there are different types of magnetic suspensions, the main distinction is between an actively controlled attractive system, known as electromagnetic suspension, and an inherently stable and passive repulsive electrodynamic system. We used the latter in the Delft Hyperloop competition vehicle, and the concept is quite simple. Moving a permanent magnet over a conductive surface, such as a sheet of aluminum, induces eddy currents in the surface, which in turn cause a Lorentz force on the magnets moving over them, lifting them up. Since the competition tube will be fitted with an aluminum track, this concept of levitation can be used in Delft’s pod.

Demonstration of the electrodynamic suspension. The handle is used to spin an aluminum disk (below the plastic cover), where a small neodymium magnet with a Hyperloop enclosure is being visibly lifted from the disk.


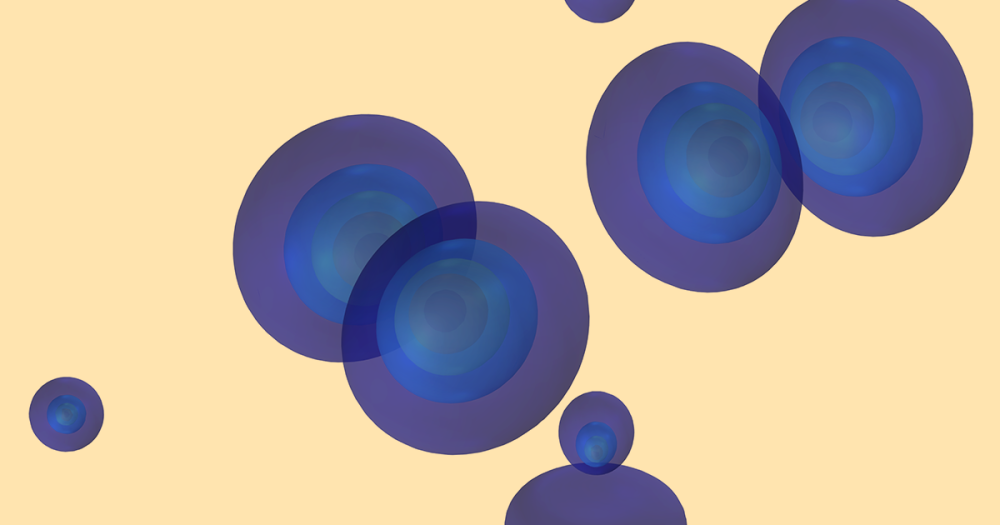
Left: Visualization of the brake magnets, which are positioned on both sides of the I-beam on the track. Right: Eddy currents in the track as a magnet moves over it.
For linear motion, the Lorentz force on a moving magnet has two components: one lifts the magnet up and the other opposes the magnet in the direction of motion. These are referred to as the lift and drag component, respectively, with the latter known for its use in eddy current brakes. These forces depend on factors like speed, magnet dimensions, field strength, conductivity of the track, and gap height. Choosing a magnet configuration therefore requires research on how its parameters affect the lift and drag components.
For the Hyperloop, it’s best that there is a low drag component and high lifting force. This is due to how a large air gap decreases the track’s accuracy demands, a major cost factor in a Hyperloop system.


Left: Rendering of the front bogie, including the “skis”, or lift bogies, with the lift magnets on the sides and the brakes in the middle. Right: The rear bogie with lift bogies, brakes, and suspension. The I-beam in the track is visible here.
Our Hyperloop pod uses four magnetic “skis” filled with Halbach arrays, a configuration of permanent magnets in which the field is strong toward the track and weak toward the passengers. We used COMSOL Multiphysics and the AC/DC Module to determine the relations between the magnet parameters and the lift and drag forces with the Magnetic and Electric Fields interface. We then performed parametric studies to plot the forces for different speeds and gap heights for a certain magnet configuration.
Evaluating the Magnetic Suspension with Simulation and Experimental Tests
Typical lift and drag curves for a constant gap height can be seen in the figure below. The drag component peaks and then diminishes for higher speeds, contrasting with, for instance, air drag. This makes it attractive for high-speed travel. Increasing the size of the individual magnets also has a positive effect on reducing the drag.

Typical lift and drag force curves for an electrodynamic suspension.
We used similar simulations to design our brake system. Naturally, we chose to use eddy current brakes in the system design. When the pod needs to stop, the brakes can be moved toward the track. As this needs a large drag component to be effective, we used COMSOL Multiphysics to quickly come up with magnet configurations that satisfy this and other requirements.
To validate our models, we built test setups to evaluate the force versus speed as well as gap curves for the final magnets, finding good agreement between the simulation and experimental results. Knowing that the simulation is accurate is very important as these curves are essential for the full-vehicle model and control systems. The simulations are at the basis of the vehicle, and with the COMSOL® software, we designed magnet arrays that will lift the vehicle when it moves at low speeds. The magnet arrays will also be able to maintain a comfortable cruising gap height of more than 20 mm.
Interested in Designing Electromagnetic Systems? Check Out These Resources
- See related posts on the COMSOL Blog:
- Watch a short video: Modeling Computational Electromagnetics with the AC/DC Module
- Learn more about the Delft Hyperloop team
About the Guest Author

Bauke Kooger is a master’s student in applied physics at the Delft University of Technology, and his passion lies in applying physics to technology. Having had previous experience in designing a battery for an electric racing car, he knows how to apply his knowledge to the simulation, design, and testing of the magnetic suspension system for the Delft Hyperloop team.


Comments (1)
Bridget Cunningham
February 13, 2017The Delft Hyperloop team was awarded the top prize at the SpaceX Hyperloop competition final. Take a ride on their innovative design: https://www.youtube.com/watch?v=k21JfrKNS2Q&feature=youtu.be.